Technologies
Imagerie 3D
Les avantages et inconvénients
Il existe un nombre important de technologies d'imagerie 3D qui ont chacune des avantages et inconvénients. Il est donc important de maîtriser plusieurs technologies pour répondre aux différents besoins spécifiques. Leurs définitions technologiques sont ci-dessous
qmt intègre plusieurs technologies dans le cadre de qmt3dmeaure qui sont disponibles dans la plateforme qmt.
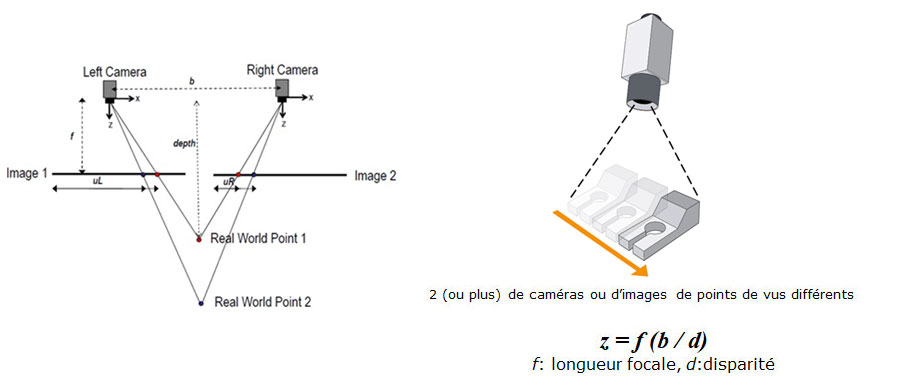
QMT Vision InspectorLa StéréoVision
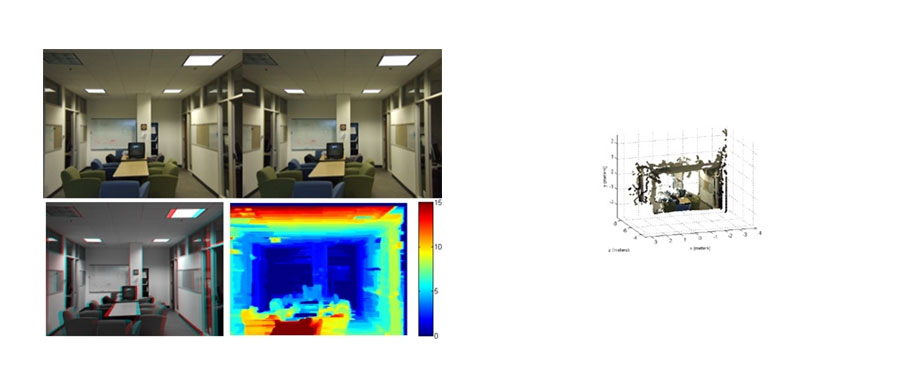
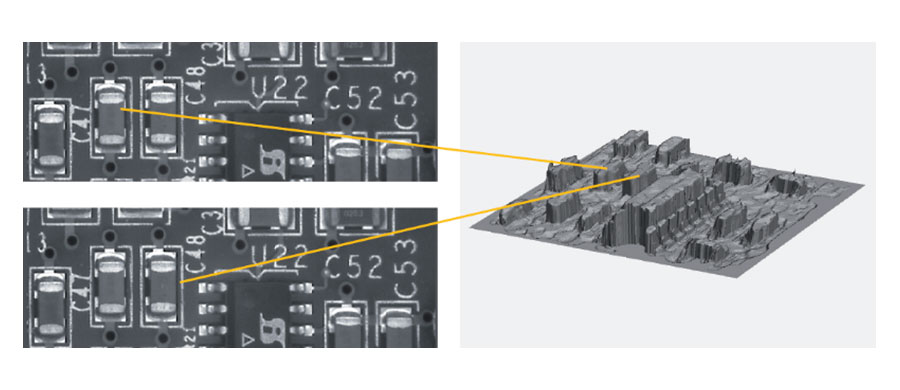
Les coordonnées 3D des points visibles de la surface de l’objet sont déterminées à partir de 2 images (ou plus) de différents points de vue. Ceci est fait en calculant la carte de disparité de la configuration des caméras étalonnées.
- Simple à mettre en oeuvre
- Technique ancienne et maitrisée
- Méthode matricielle
- Dépend de la «calibration»
- Seules les disparités sont reconstruites en 3D (2.5D)
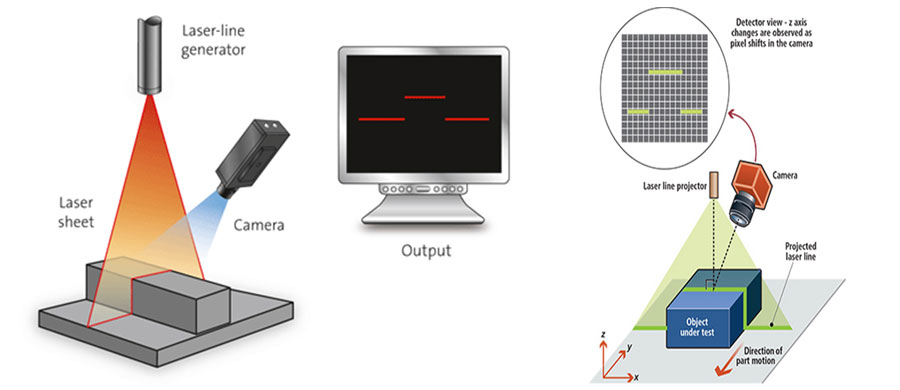
Triangulation laser
Une ligne (ou un point) laser est projetée sur un objet et est observée par une caméra avec un certain angle connu. Les différences de hauteur de l’objet le long de la ligne laser (z) correspondent aux différences de hauteur z’ vues sur le capteur. En fonction de z’ et de l’angle de la caméra, les distances z sont calculables. Une ligne ou un point laser balaient l’objet et une caméra reconstruit l’image.
- Résolution en z
- Robuste et répétable
- Dépendance de la brillance et de la réflectivité et de la forme (diffraction)
- Sensible à l’ombrage
Scanner laser
Un scanner laser 3D est un appareil qui utilise un faisceau laser pour sonder le sujet. Au cœur de ce type de scanner se trouve un télémètre laser permettant de calculer la distance avec la surface de l'objet étudié en comptant le temps nécessaire au trajet aller-retour de l'impulsion du faisceau laser réfléchi. Le scan peut se faire en réorientant le scanner à chaque point, mais se fait, en général, en réorientant un miroir réfléchissant.
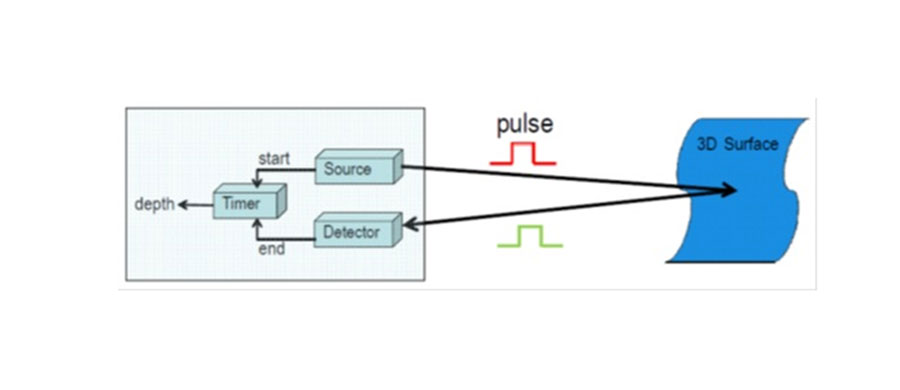
Source : Depth Biomechanics®
Une autre technologie utilisée par les scanners laser pour mesurer des distances est la « mesure de décalage de phase ». Le scanner émet un rayon laser qui, au contact de l'objet, est réfléchi vers le scanner laser. Celui-ci calcule la distance au millimètre près en analysant le décalage de phase entre le rayon émis et le rayon reçu.
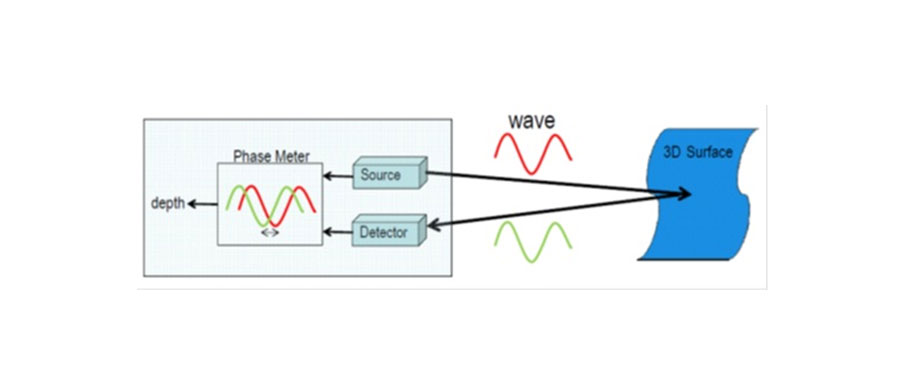
Source : Depth Biomechanics®
- Résolution en z (TOF>PS)
- Robuste et répétable (TOF>PS)
- Dépendance de la brillance et de la réflectivité et de la forme (diffraction)
- Vitesse d’acquisition (TOF>> PS)
Projection de motifs
Une lumière structurée (motif connu) est projetée sur l’objet. Le motif lumineux sera déformé par l’objets et le motif observé par la caméra sera donc différent de celui initialement projeté. En déterminant le décalage de chaque pixel dans le motif, il est possible de déterminer la profondeur d'un point donné dans le champ de vision de la caméra. Les interférences entre deux Lasers peuvent aussi être utilisées pour créer le motif (laser interference method).
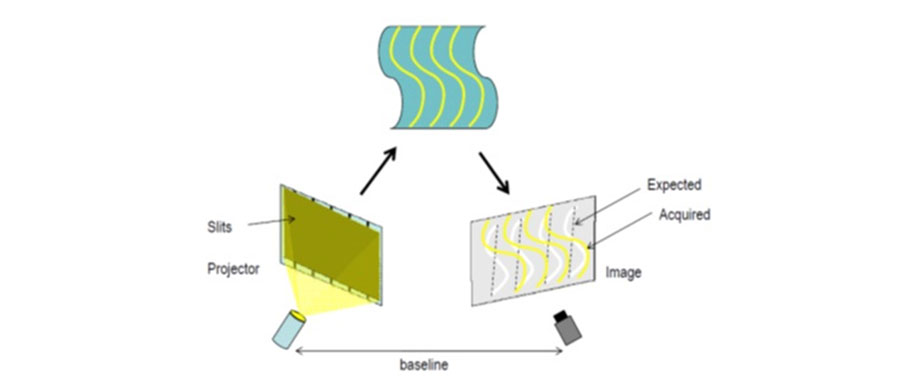
Source : Depth Biomechanics®
Détection de défauts d’aspect
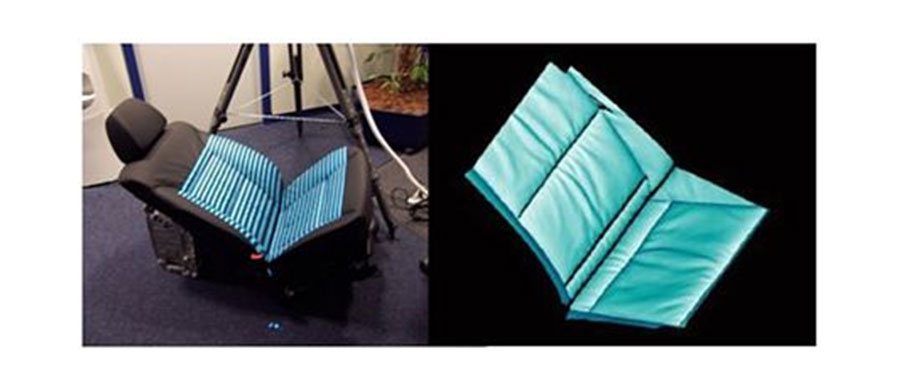
Source : Wikiwand
- Simple et peu couteux
- Vitesse
- Résolution limitée à la taille du motif
- Pas compatible avec les échantillons transparent et réflectif
Shape from shading
Appelée aussi «Photometric stereo », la technique consiste à observer un objet dans différentes conditions d'éclairage. Elle est basé sur le fait que la quantité de lumière réfléchie par une surface dépend de l’orientation de la surface par rapport à la source de lumière et à l’observateur. En mesurant la quantité de lumière réfléchie dans une caméra, l'espace des orientations de surface possibles est limité. Quand l’objet est éclairé avec suffisamment de sources lumineuses d'angles différents, l'orientation de la surface peut être limitée à une seule orientation.
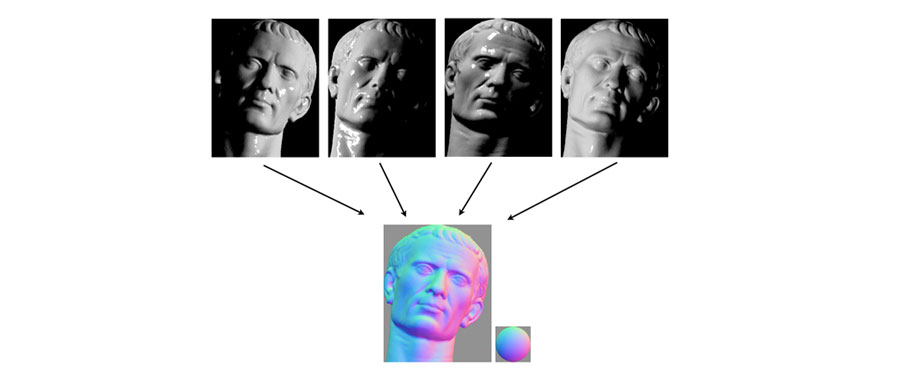
Source : Wikipedia
- Vitesse
- Innovant
- Dépend de la surface de l’objet
- Peu précis
White light interferometry
L'interférométrie est une méthode de mesure qui exploite les interférences intervenant entre plusieurs ondes cohérentes entre elles.
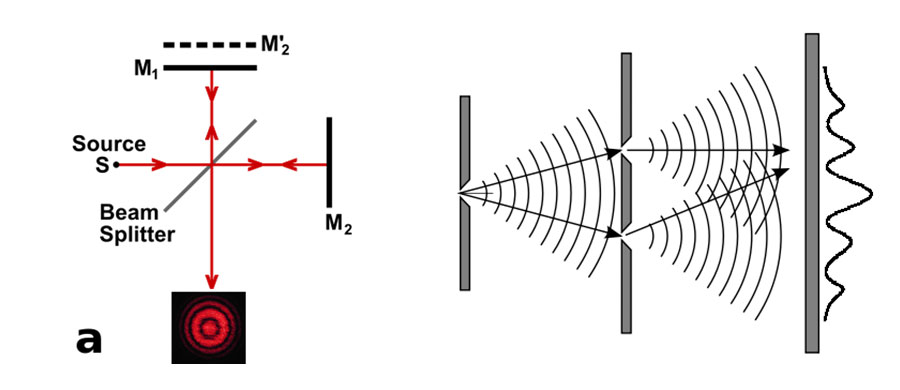
Source : Wikipedia
2 ondes cohérentes peuvent interférer de manière constructive (renforcement de l'intensité) si elles arrivent en phase, ou interférer de manière destructive (affaiblissement de l'intensité) si elles arrivent en déphasage.
Source : Wikipedia
Source : Wikiwand
- Champ de vision
- Vitesse
- Dépend de la surface de l’objet
- Sensible aux vibrations
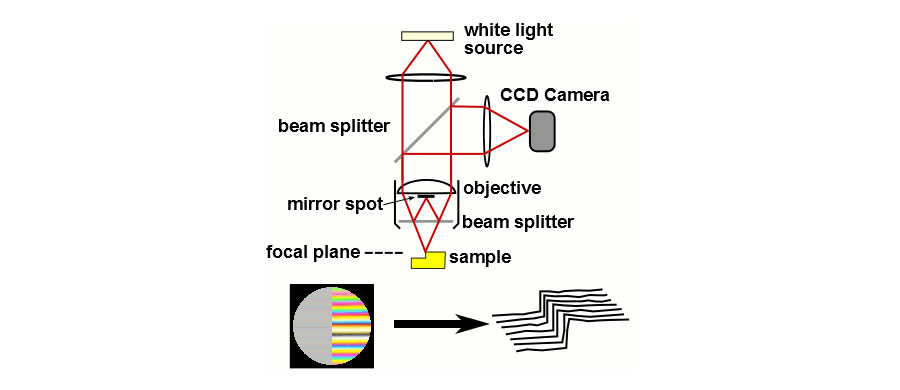
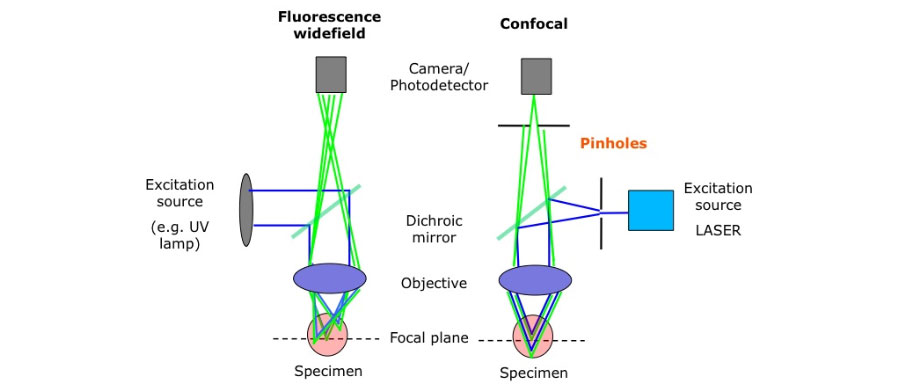
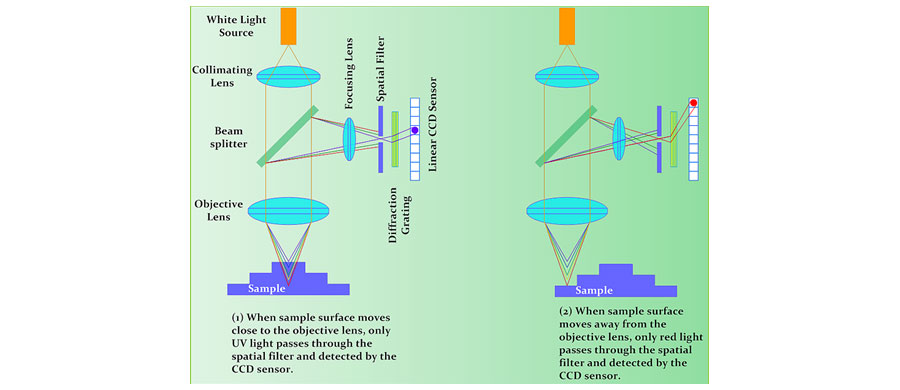
Confocal et Confocal chromatique
Un microscope confocal réalise des images de très faible profondeur de champ en positionnant le plan focal de l’objectif à différents niveaux de profondeur dans l’échantillon. Un balayage (scan) en x-y-z permet de réaliser des séries d’images à partir desquelles on peut obtenir une image 3D.
Un microscope confocal chromatique, utilise une lumière blanche (multi-spectres) qui permet de ne plus balayer en z et de mesurer également des échantillons non-transparents.
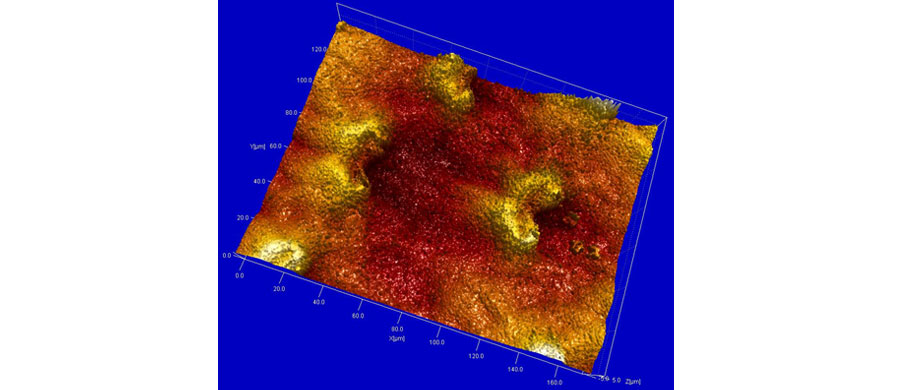
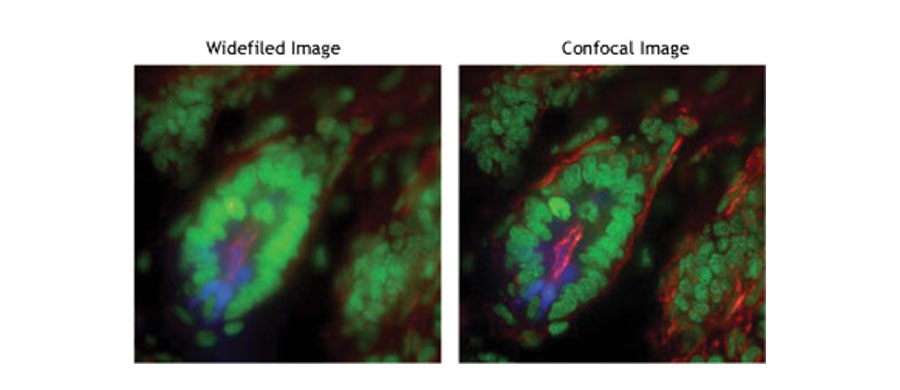
Exemple d’images en confocale vs. champs large
- Résolution
- Flexibilité
- Vitesse et sensibilité aux grands angles






