Technologies
3D Imaging
The pros and cons
There are a significant number of 3D imaging technologies that each have their own advantages and disadvantages. It is therefore important to master several technologies to meet different specific needs. Their technological definitions are below
Qualimatest integrates several technologies within the framework of QMT3DMesure which are available in the QMT Vision Inspector platform.
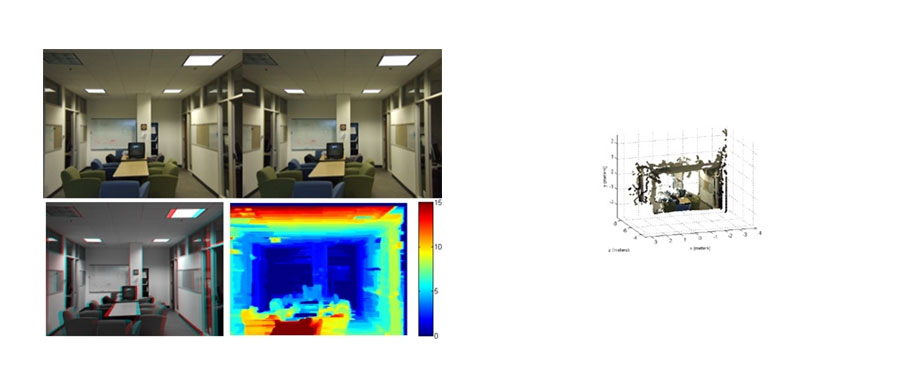
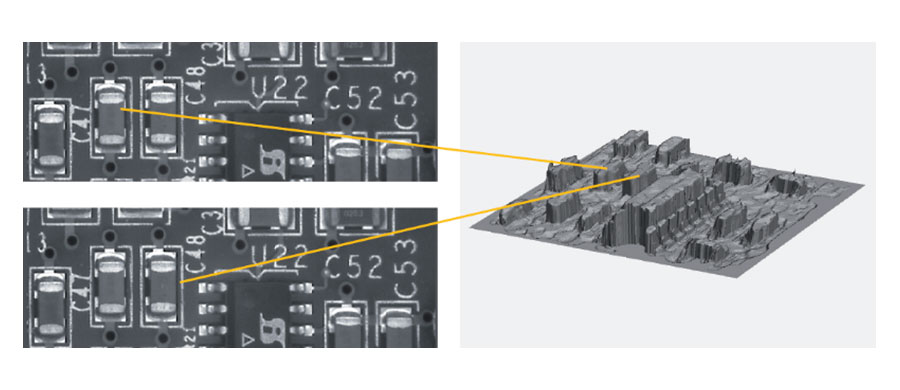
QMT Vision InspectorStereoVision
The 3D coordinates of the visible points of the object surface are determined from 2 images (or more) from different points of view. This is done by calculating the disparity map of the configuration of the calibrated cameras.
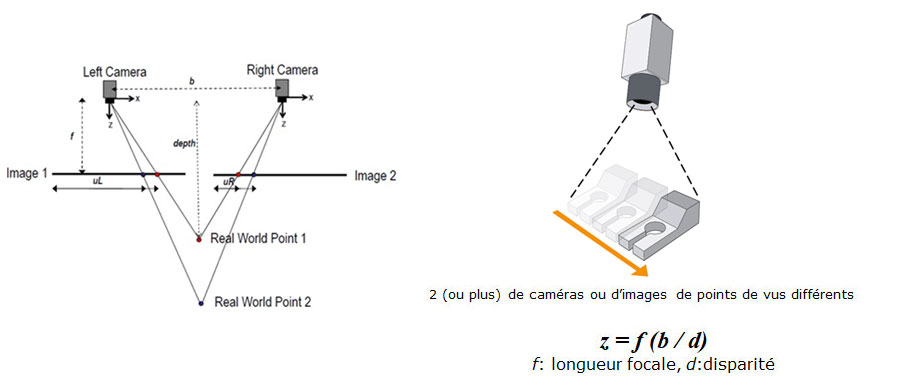
- Simple to implement
- Old and mastered technique
- Matrix method
- Depends on "calibration"
- Only the disparities are reconstructed in 3D (2.5D)
Laser triangulation
A laser line (or point) is projected onto an object and is observed by a camera at a certain known angle. The differences in height of the object along the laser line (z) correspond to the differences in height z 'seen on the sensor. Depending on z 'and the angle of the camera, the distances z can be calculated. A line or laser point sweeps across the object and a camera reconstructs the image.
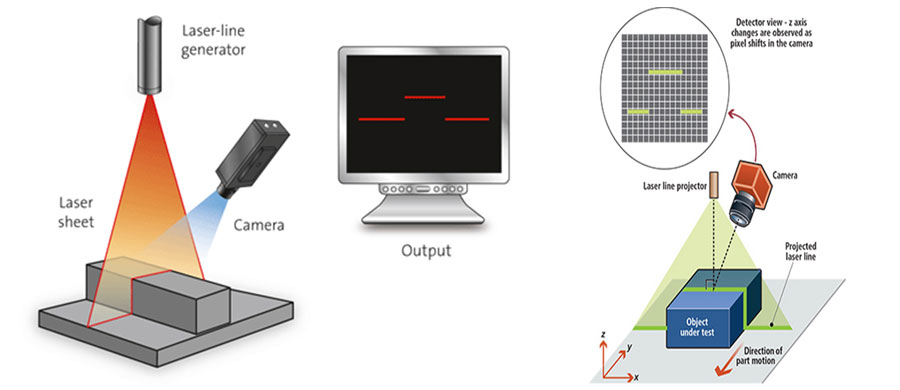
- Z resolution
- Robust and repeatable
- Dependence on gloss and reflectivity and shape (diffraction)
- Sensitive to shading
Laser scanner
A 3D laser scanner is a device that uses a laser beam to probe the subject. At the heart of this type of scanner is a laser range finder allowing the distance to the surface of the studied object to be calculated by counting the time required for the round trip of the reflected laser beam pulse. The scan can be done by reorienting the scanner at each point, but is generally done by reorienting a reflecting mirror.
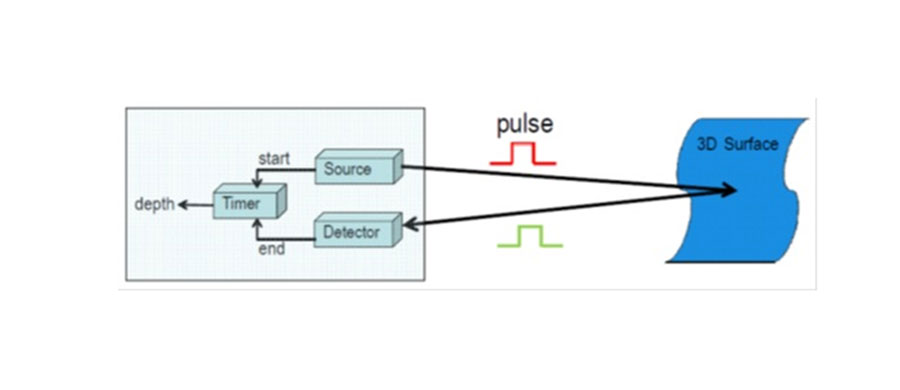
Source: Depth Biomechanics®
Another technology used by laser scanners to measure distances is "phase shift measurement". The scanner emits a laser beam which, on contact with the object, is reflected back to the laser scanner. This calculates the distance to the nearest millimeter by analyzing the phase shift between the beam emitted and the beam received.
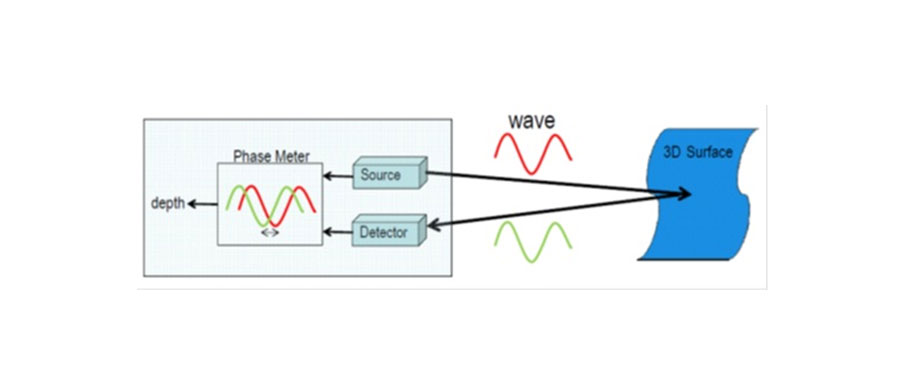
Source: Depth Biomechanics®
- Resolution in z (TOF> PS)
- Robust and repeatable (TOF> PS)
- Dependence on gloss and reflectivity and shape (diffraction)
- Acquisition speed (TOF >> PS)
Pattern projection
A structured light (known pattern) is projected onto the object. The light pattern will be distorted by the objects and the pattern observed by the camera will therefore be different from that initially projected. By determining the offset of each pixel in the pattern, it is possible to determine the depth of a given point in the camera's field of view. Interference between two lasers can also be used to create the pattern (laser interference method).
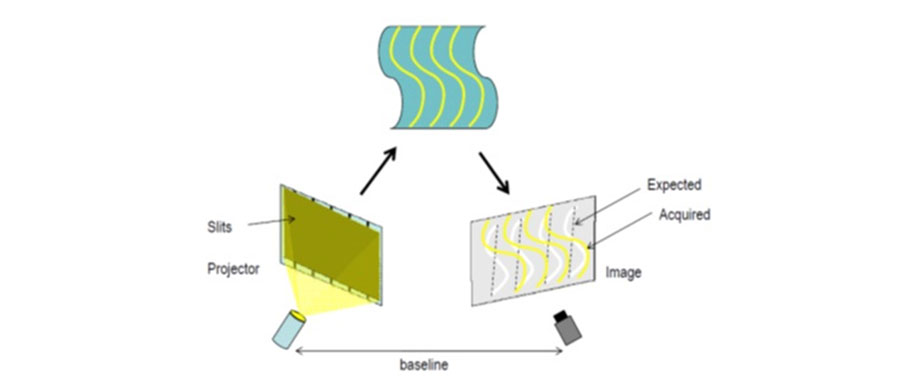
Source: Depth Biomechanics®
Detection of appearance defects
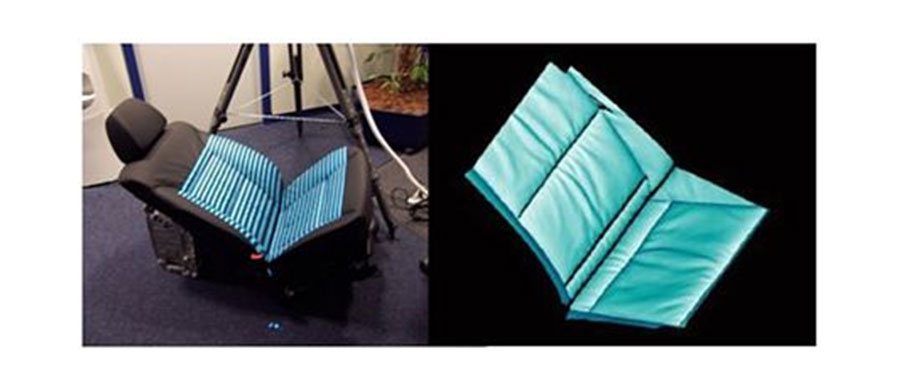
Source: Wikiwand
- Simple and inexpensive
- Speed
- Resolution limited to pattern size
- Not compatible with transparent and reflective samples
Shape from shading
Also called "Photometric stereo", the technique consists of observing an object in different lighting conditions. It is based on the fact that the amount of light reflected from a surface depends on the orientation of the surface with respect to the light source and the observer. By measuring the amount of light reflected in a camera, the space of possible surface orientations is limited. When the object is illuminated with enough light sources from different angles, the orientation of the surface can be limited to one orientation.
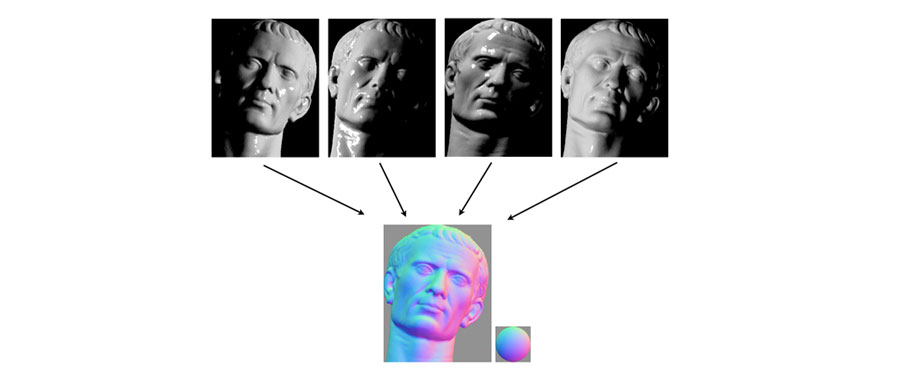
Source: Wikipedia
- Speed
- Innovative
- Depends on the surface of the object
- Not very precise
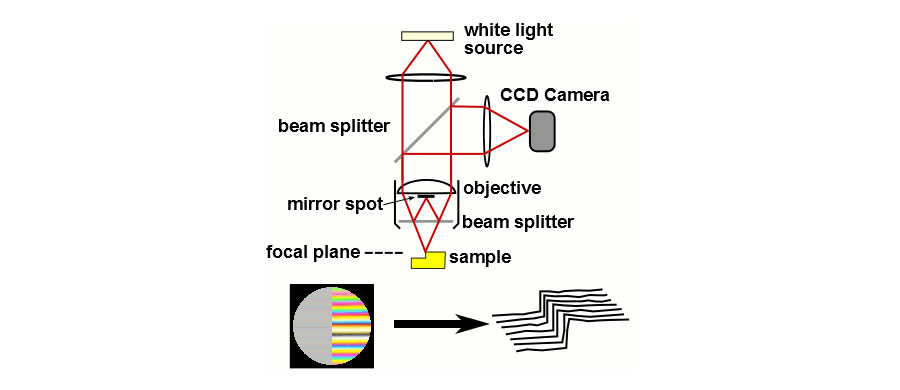
White light interferometry
Interferometry is a measurement method which exploits the interference occurring between several coherent waves.
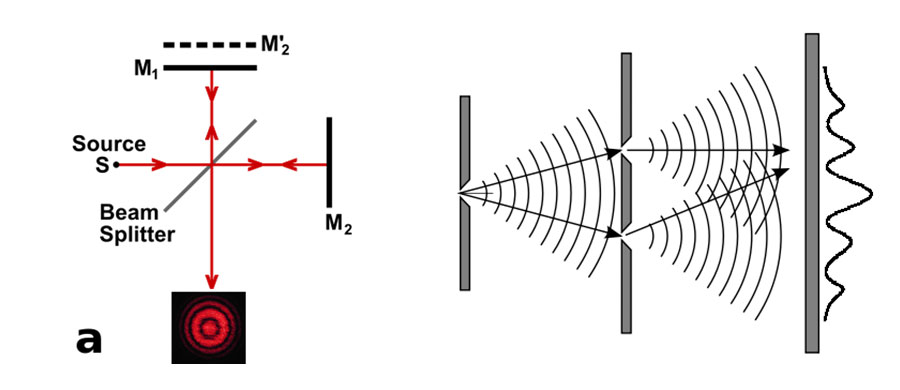
Source: Wikipedia
2 coherent waves can constructively interfere (strengthening the intensity) if they arrive in phase, or interfere destructively (weakening the intensity) if they arrive out of phase.
Source: Wikipedia
Source: Wikiwand
- Field of view
- Speed
- Depends on the surface of the object
- Sensitive to vibrations
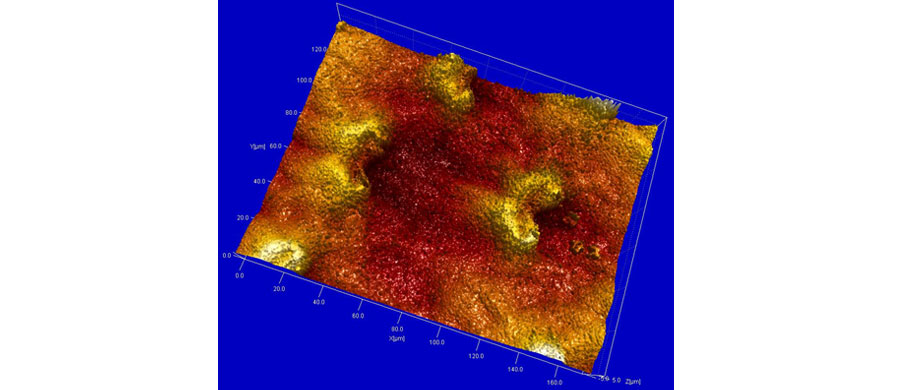
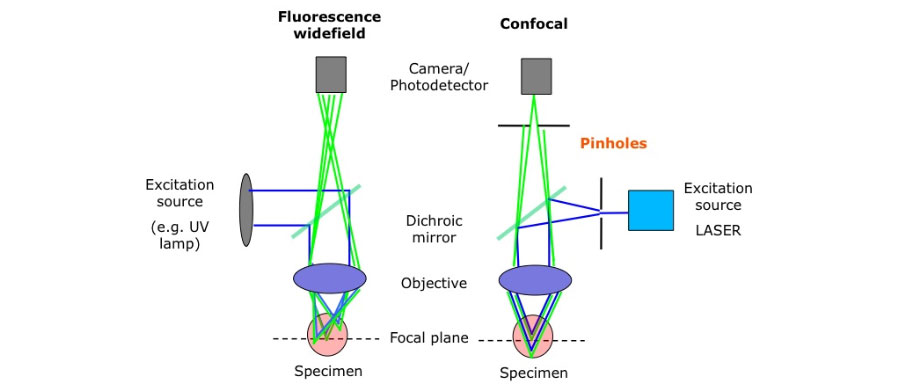
Confocal and Chromatic Confocal
A confocal microscope takes images of very shallow depth of field by positioning the focal plane of the objective at different levels of depth in the sample. A scan in xyz makes it possible to produce series of images from which a 3D image can be obtained.
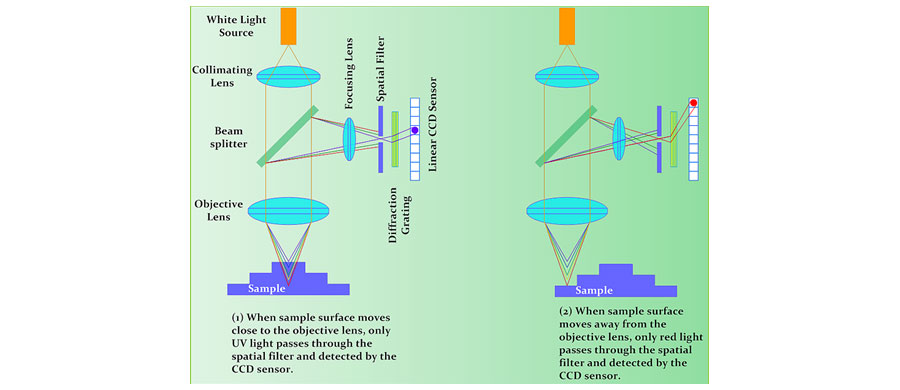
A confocal chromatic microscope uses white light (multispectra) which makes it possible to no longer scan in z and also to measure non-transparent samples.
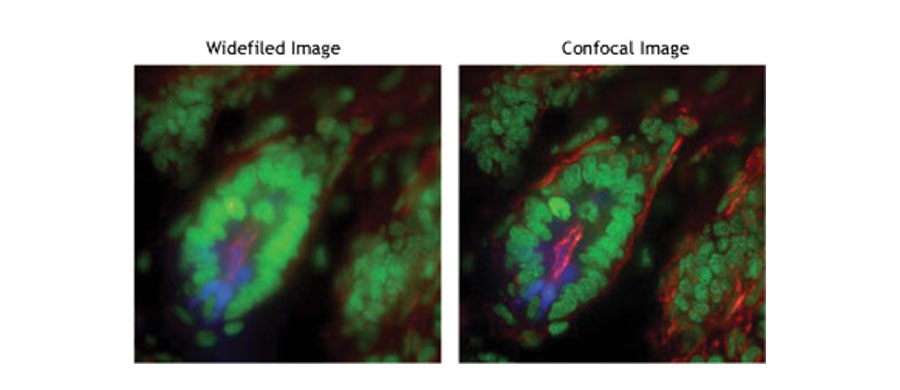
Example of images in confocal vs. wide fields
- Resolution
- Flexibility
- Wide angle speed and sensitivity






